Räumliche Ableitungen aus Geodaten
Von Punktdaten, Höhenrastern und Modellannahmen zu neuen räumlichen Informationen
Leitfrage der Sitzung
Räumliche Analyse beginnt dort, wo aus vorhandenen Daten neue räumliche Informationen abgeleitet werden.
Der Kern der Sitzung ist deshalb:
Wie werden aus Punktmessungen, Höhenrastern und Modellannahmen nachvollziehbare räumliche Ableitungen?
Lernziele
Nach der Sitzung sollten Sie erklären können,
- warum räumliche Analyse mehr ist als eine Abfrage,
- wie aus Punktdaten flächenhafte Schätzungen entstehen,
- warum Interpolation immer eine Modellentscheidung ist,
- wie aus Höhenrastern lokale und gerichtete Geländeinformationen abgeleitet werden,
- wie Sichtbarkeit und Reliefhydrologie aus Höhenmodellen berechnet werden,
- warum jedes Analyseergebnis über Datenbasis, Maßstab, Parameter und Annahmen interpretiert werden muss.
Von der Abfrage zur Analyse
Eine Abfrage fragt meist:
Welche vorhandenen Objekte erfüllen eine Bedingung?
Eine räumliche Analyse fragt dagegen:
Welche neue räumliche Information kann aus vorhandenen Daten, Annahmen und Regeln erzeugt werden?
Räumliche Analyse ist begründete Transformation
Aus räumlichen Daten werden neue Informationen:
Entscheidend ist nicht nur, welches Werkzeug verwendet wurde, sondern welche Annahme damit in die Analyse eingebaut wird.
Zwei Richtungen räumlicher Analyse
Räumliche Ableitung
Aus vorhandenen Daten entstehen neue räumliche Informationen.
Beispiele: Voronoi-Flächen, Interpolation, Reliefparameter, Sichtfelder, Flow Accumulation.
Räumliche Bewertung
Mehrere räumliche Informationen werden standardisiert, gewichtet und kombiniert.
Beispiele: Eignungskarten, Multikriterienanalyse, Kostenoberflächen.
Räumliche Analyse in der Geographie
Räumliche Analyse ist älter als GIS-Software.
Viele Verfahren der quantitativen Raumanalyse und räumlichen Statistik wurden entwickelt, bevor digitale GI-Systeme breit verfügbar waren (vgl. Berry und Marble 1968).
Mit GIS wurden diese Verfahren praktisch integrierbar: Datenerfassung, Datenverwaltung, Analyse und Visualisierung liegen in einer gemeinsamen Arbeitsumgebung.
Eine Karte ist nicht deshalb aussagekräftig, weil sie mit GIS erzeugt wurde. Aussagekräftig wird sie erst durch begründete Daten, Methode, Maßstab und Interpretation.
Rasterbasierte Ableitungen
Rasterdaten beschreiben den Raum als regelmäßiges Zellgitter.
Jede Zelle enthält einen Wert:
Rasteranalyse verändert, kombiniert oder interpretiert diese Zellwerte und erzeugt daraus neue räumliche Informationen.
Voronoi-Polygone als Nähemodell
Voronoi-Polygone teilen einen Raum so auf, dass jede Fläche genau einem Ausgangspunkt zugeordnet wird.
Innerhalb einer Fläche liegt jeder Ort näher am zugehörigen Punkt als an jedem anderen Punkt.
Voronoi ist ein geometrisches Nullmodell: gleichförmiger Raum, keine Barrieren, keine Topographie, keine Wegkosten, keine Prozessinformation.
Voronoi-Konstruktion
Die Grenzen liegen dort, wo zwei benachbarte Punkte gleich weit entfernt sind. So wird aus Punktlage eine flächige Zuordnung.
Voronoi: Schweiz-Beispiel
Jede Fläche wird der nächstgelegenen Niederschlagsstation zugeordnet. Das ist keine klimatologische Modellierung, sondern eine Zuordnung nach euklidischer Distanz.
Interpolation: Punktmessungen zur Fläche
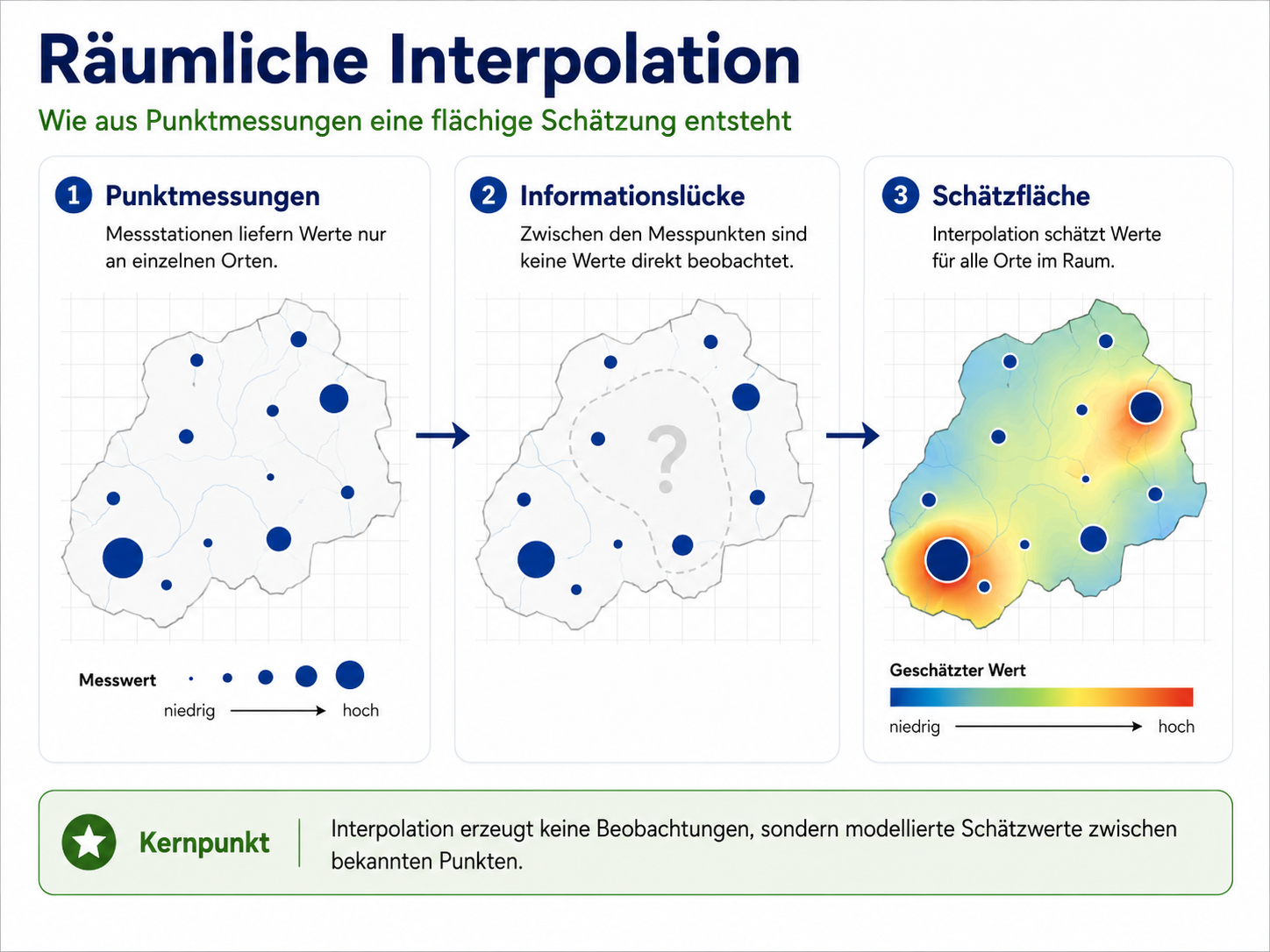
Interpolation schätzt Werte zwischen bekannten Messpunkten. Die Fläche ist kein Messwert, sondern ein Modellprodukt.
Was Interpolation voraussetzt
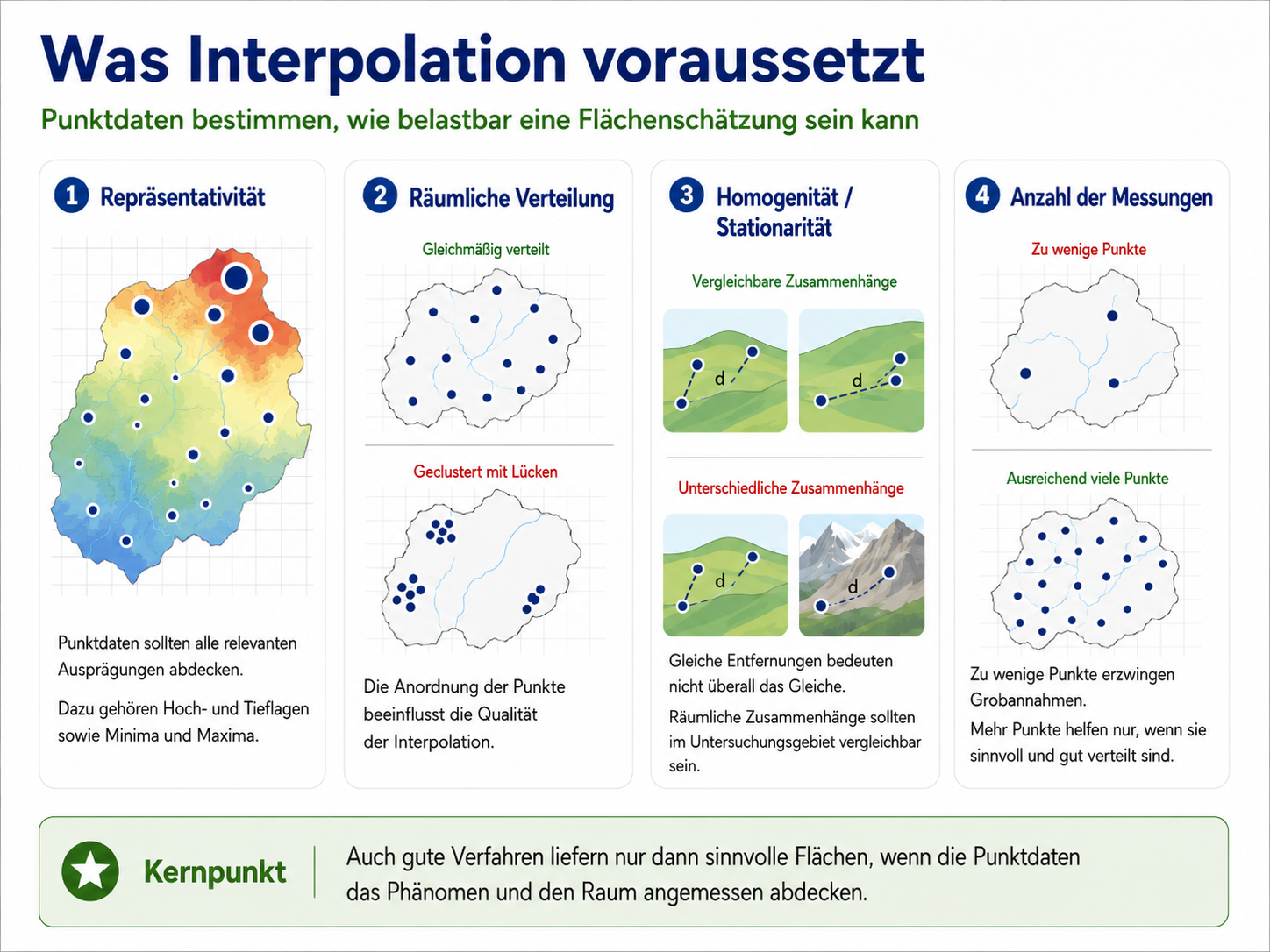
Entscheidend sind nicht nur Methode und Software, sondern Repräsentativität, räumliche Verteilung, Homogenität und Anzahl der Messpunkte.
Interpolation als Modellentscheidung
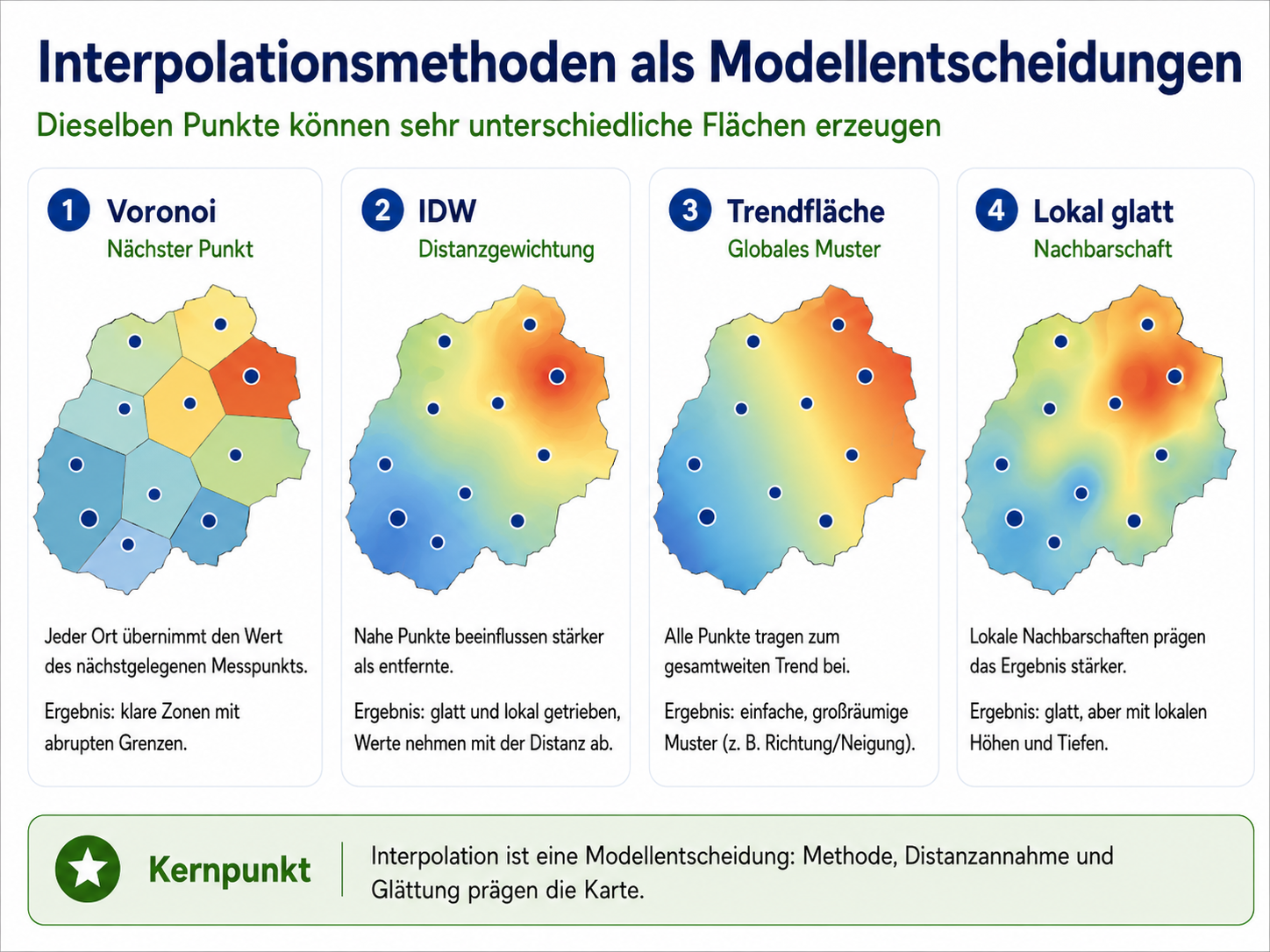
Dieselben Punktdaten können unterschiedliche Flächen erzeugen. Jede Methode übersetzt Nähe, Glättung und räumliche Abhängigkeit anders.
Globale und lokale Interpolation
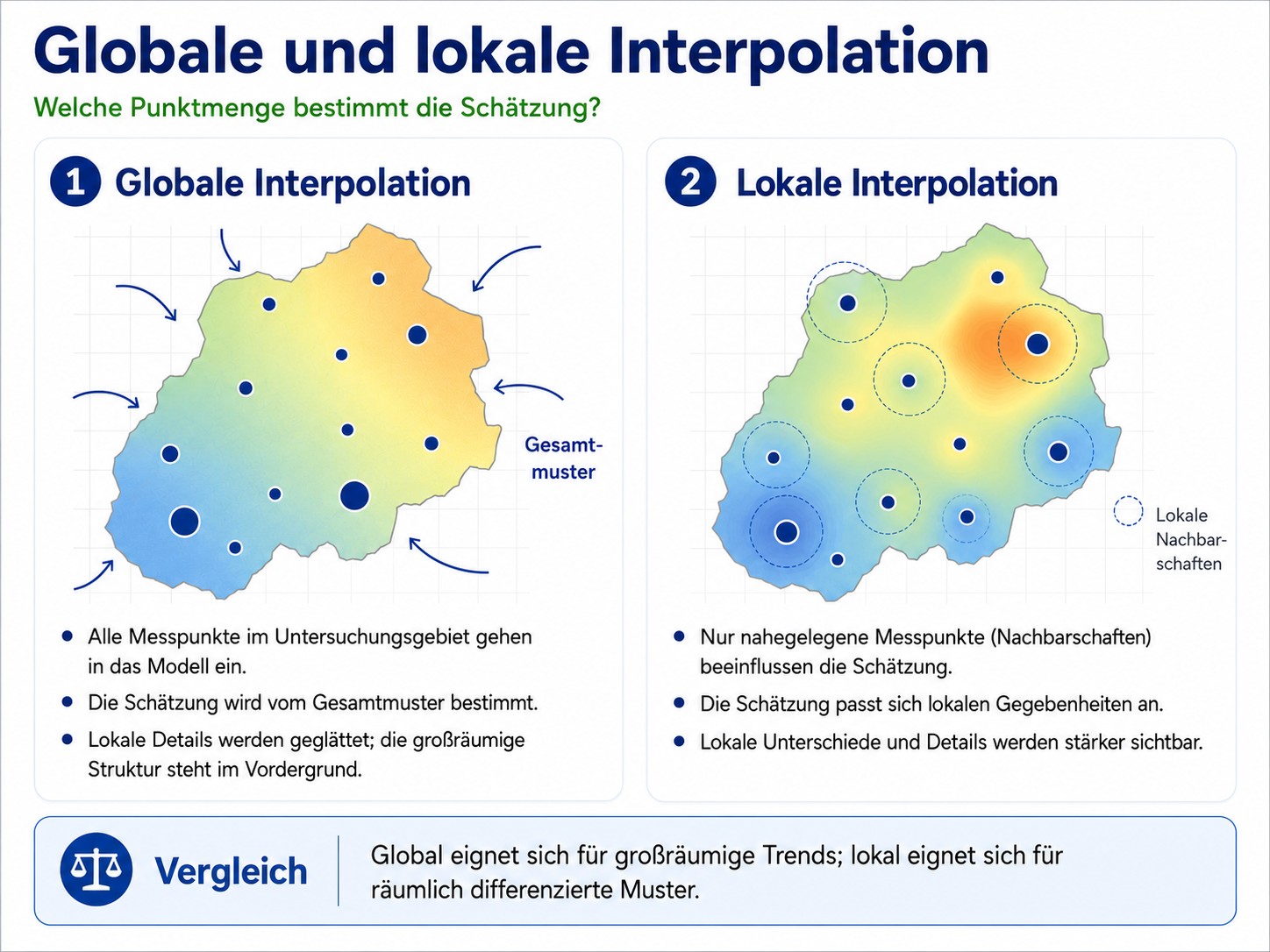
Globale Verfahren betonen großräumige Trends. Lokale Verfahren reagieren stärker auf Nachbarschaften und Punktverteilung.
Exakt und nicht-exakt
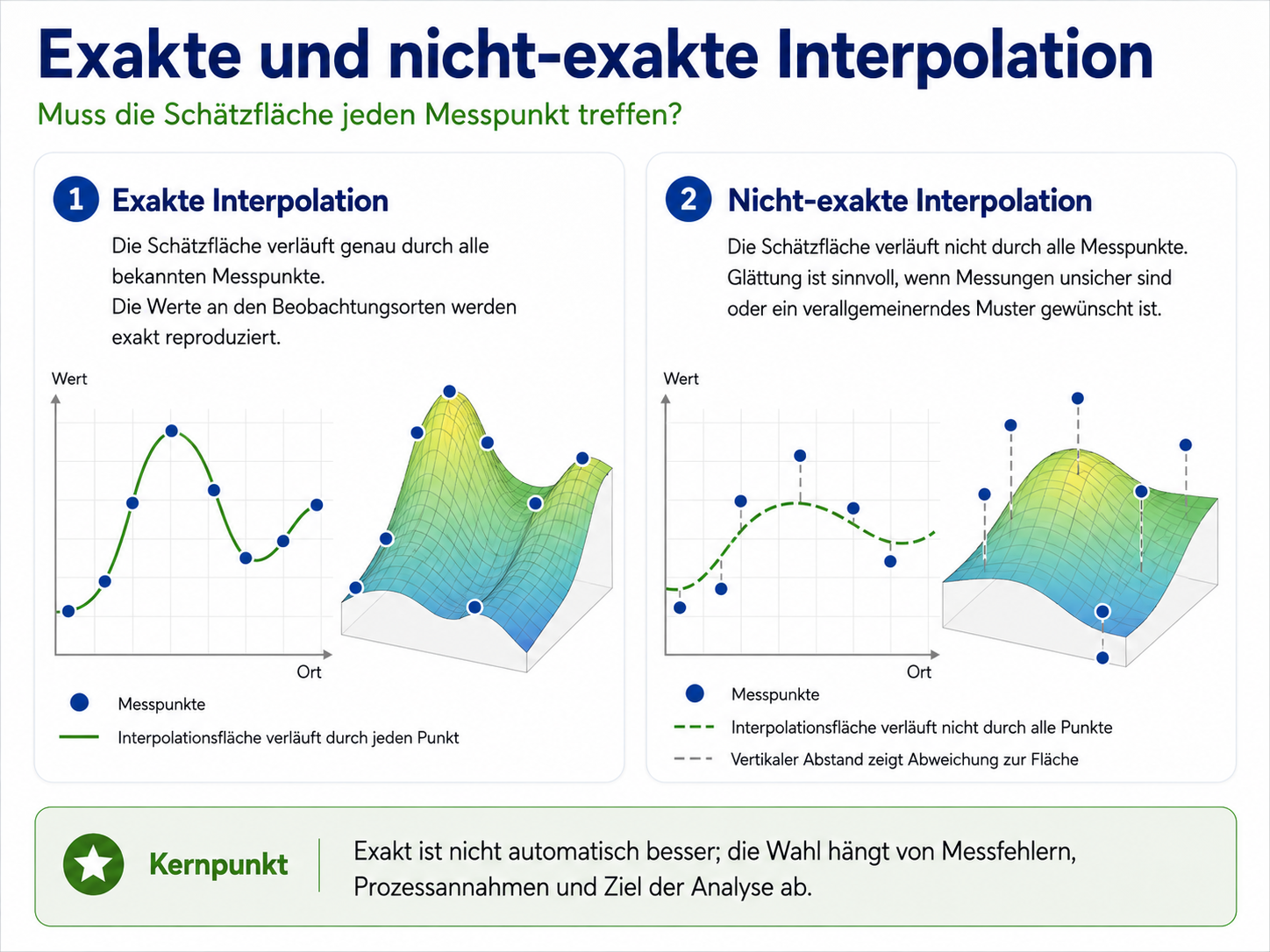
Exakt bedeutet: Die Oberfläche trifft die Messpunkte. Nicht-exakt bedeutet: Die Oberfläche glättet und kann Unsicherheit berücksichtigen.
Niederschlagsflächen vergleichen
Bei Niederschlag muss die Topographie mitgelesen werden: Höhe, Luv/Lee, Täler und Stationsverteilung entscheiden, ob eine Fläche plausibel wirkt.
Digitale Geländemodelle
Ein DGM speichert zunächst nur Höhe.
Räumliche Analyse beginnt, wenn aus Höhenwerten neue Informationen abgeleitet werden:
Das DGM ist damit kein Endprodukt, sondern ein Ausgangspunkt für Geländeinterpretation.
DGM: von Höhe zu Information
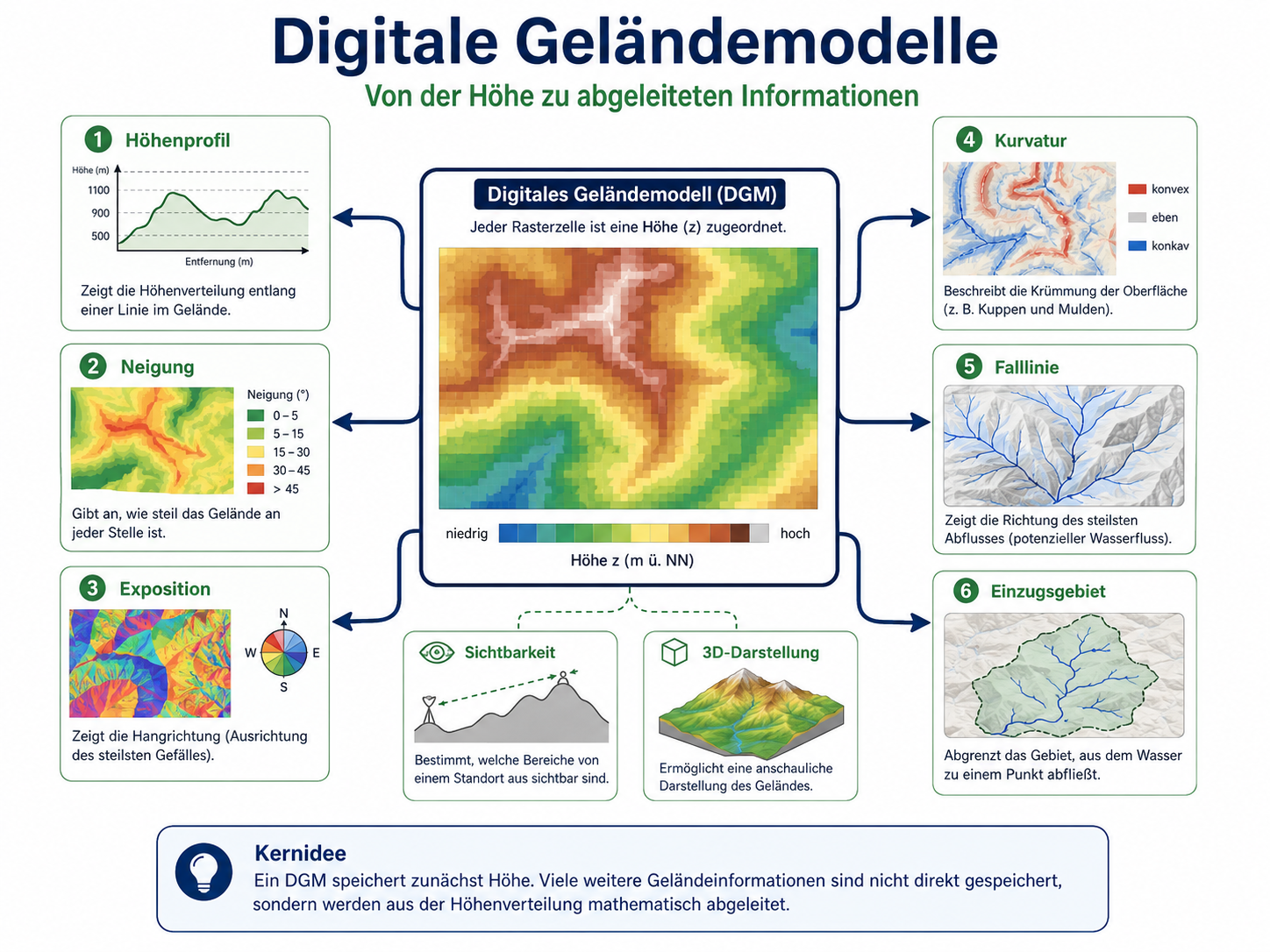
Aus derselben Höhenoberfläche entstehen unterschiedliche Ableitungen: lokale Geländeparameter, Linieninformationen und flächenhafte Einheiten.
Lokale Geländeparameter
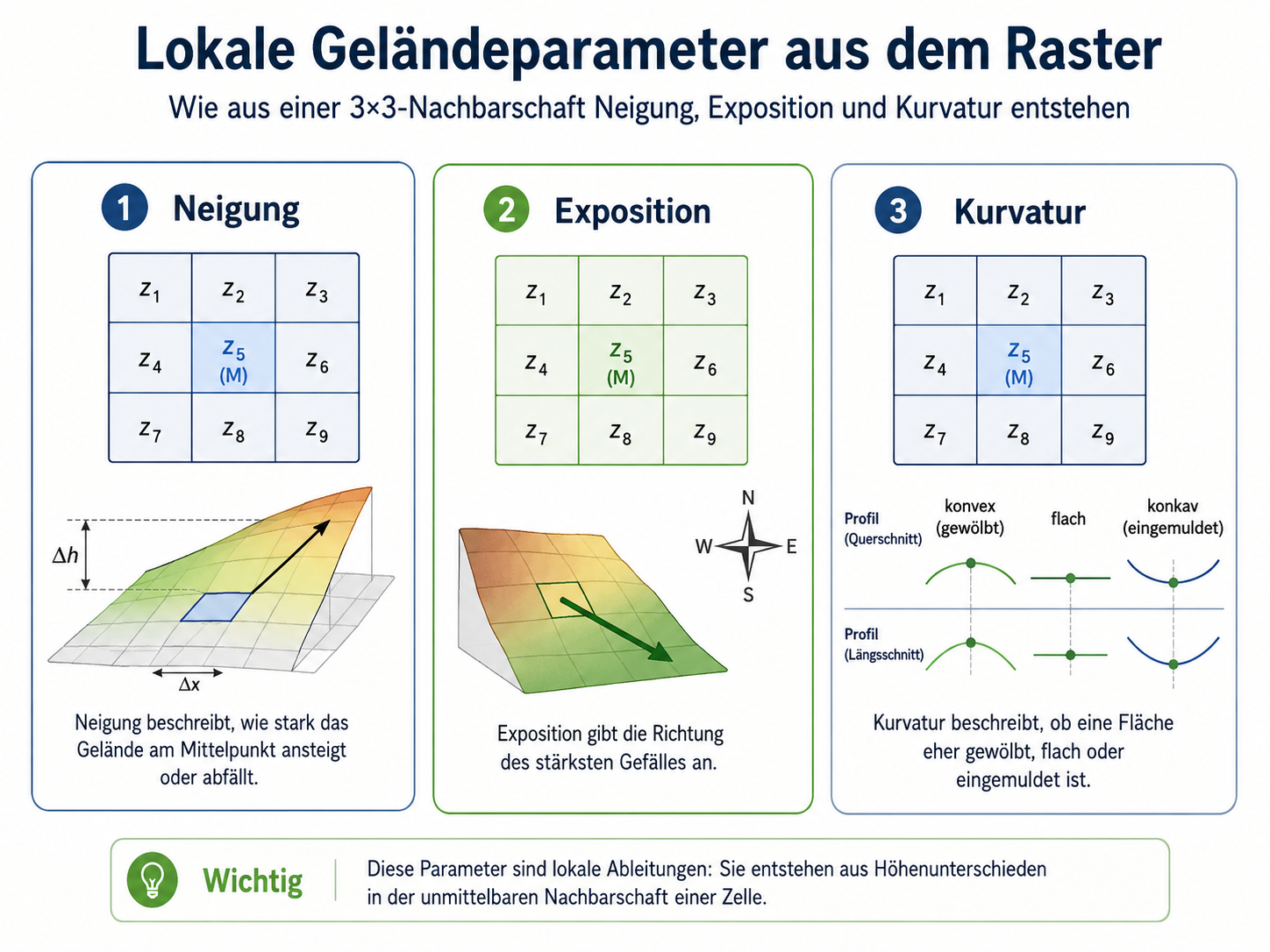
Neigung, Exposition und Kurvatur entstehen aus Höhenunterschieden in der Nachbarschaft einer Rasterzelle.
Profile, Pauschalgefälle und Falllinien
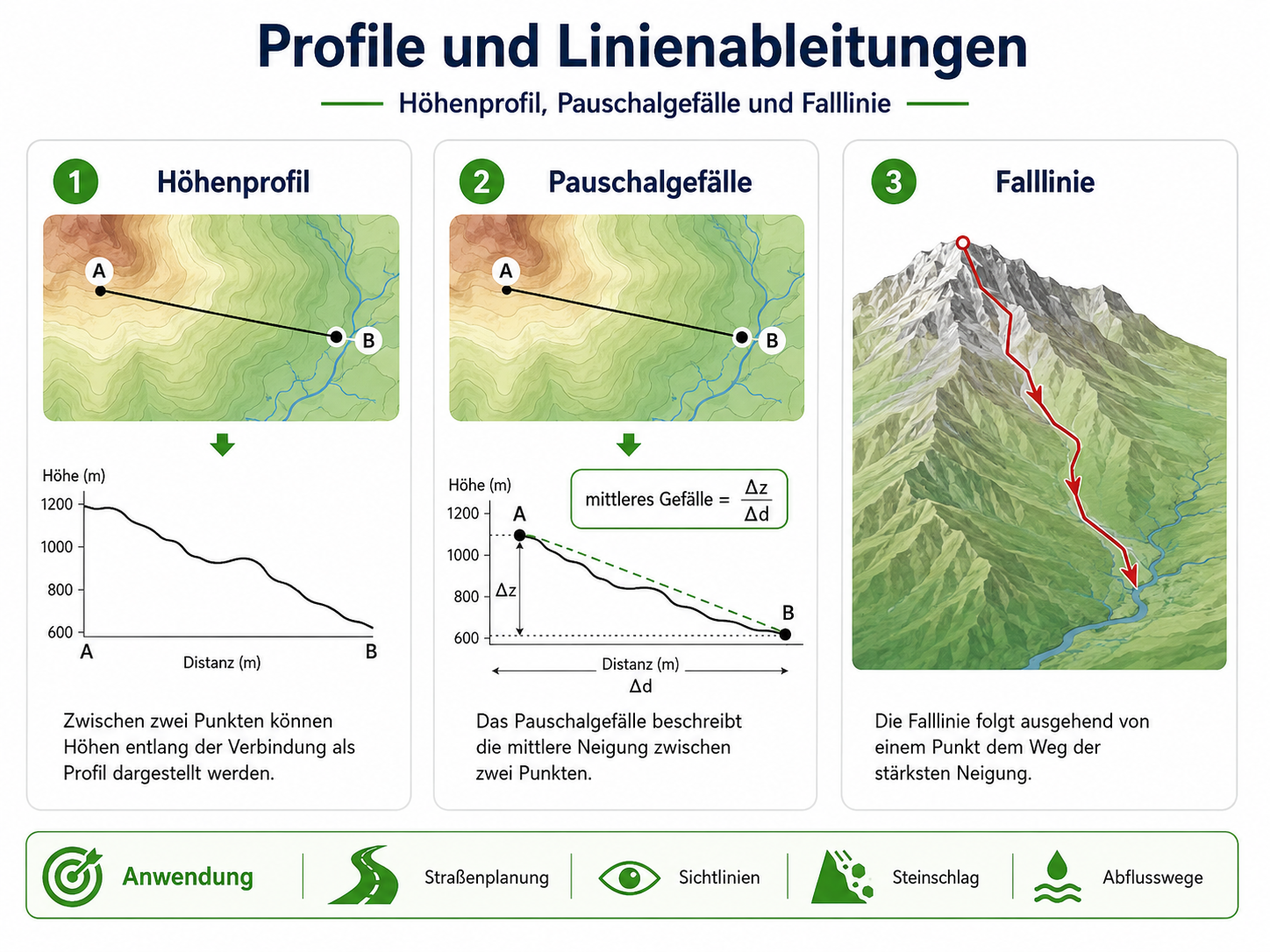
Profile beschreiben Höhenverläufe, Pauschalgefälle mittlere Neigung, Falllinien gerichtete Pfade entlang des stärksten Gefälles.
Anwendungen geomorphometrischer Ableitungen
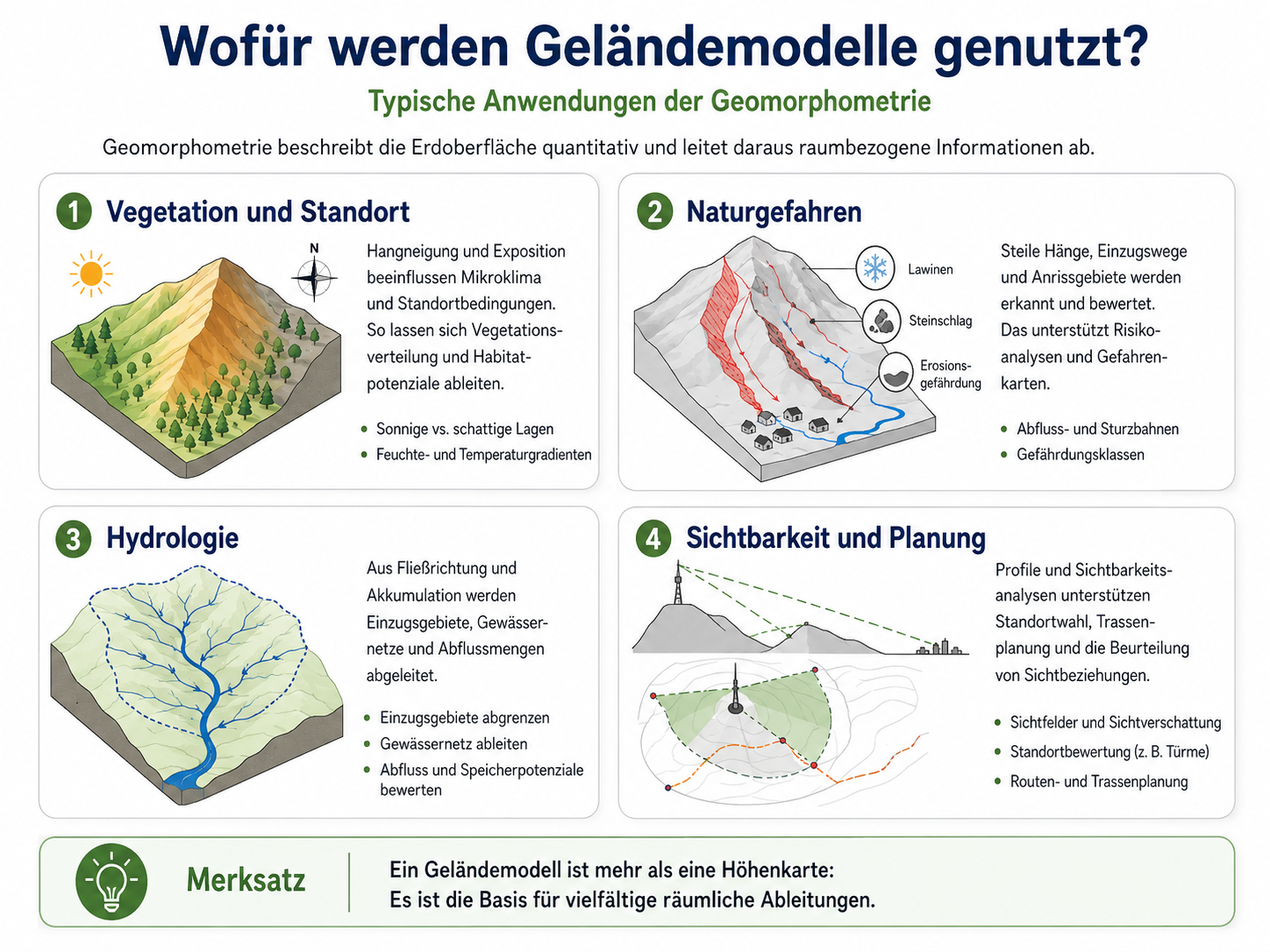
Geomorphometrische Ableitungen sind keine bloßen Zusatzkarten. Sie übersetzen Höhe in planungs-, prozess- und standortbezogene Information.
Anschluss: Sichtbarkeit und Reliefhydrologie
Die DGM-Ableitungen führen in zwei Richtungen weiter:
Sichtbarkeit
Höhenprofil und Sichtlinie entscheiden, ob ein Zielpunkt sichtbar ist.
Viele Sichtlinien ergeben ein Sichtfeld.
Reliefhydrologie
Lokale Gefälle werden zu Fließrichtungen.
Aus Richtungen entstehen Akkumulations- und Indexraster.
Sichtbarkeit als Ableitung
Sichtbarkeit ist keine Eigenschaft eines Punktes allein.
Sie ist eine Beziehung zwischen:
Ein Ziel ist sichtbar, wenn die Sichtlinie nicht durch Gelände blockiert wird.
Grundprinzip der Sichtbarkeitsanalyse
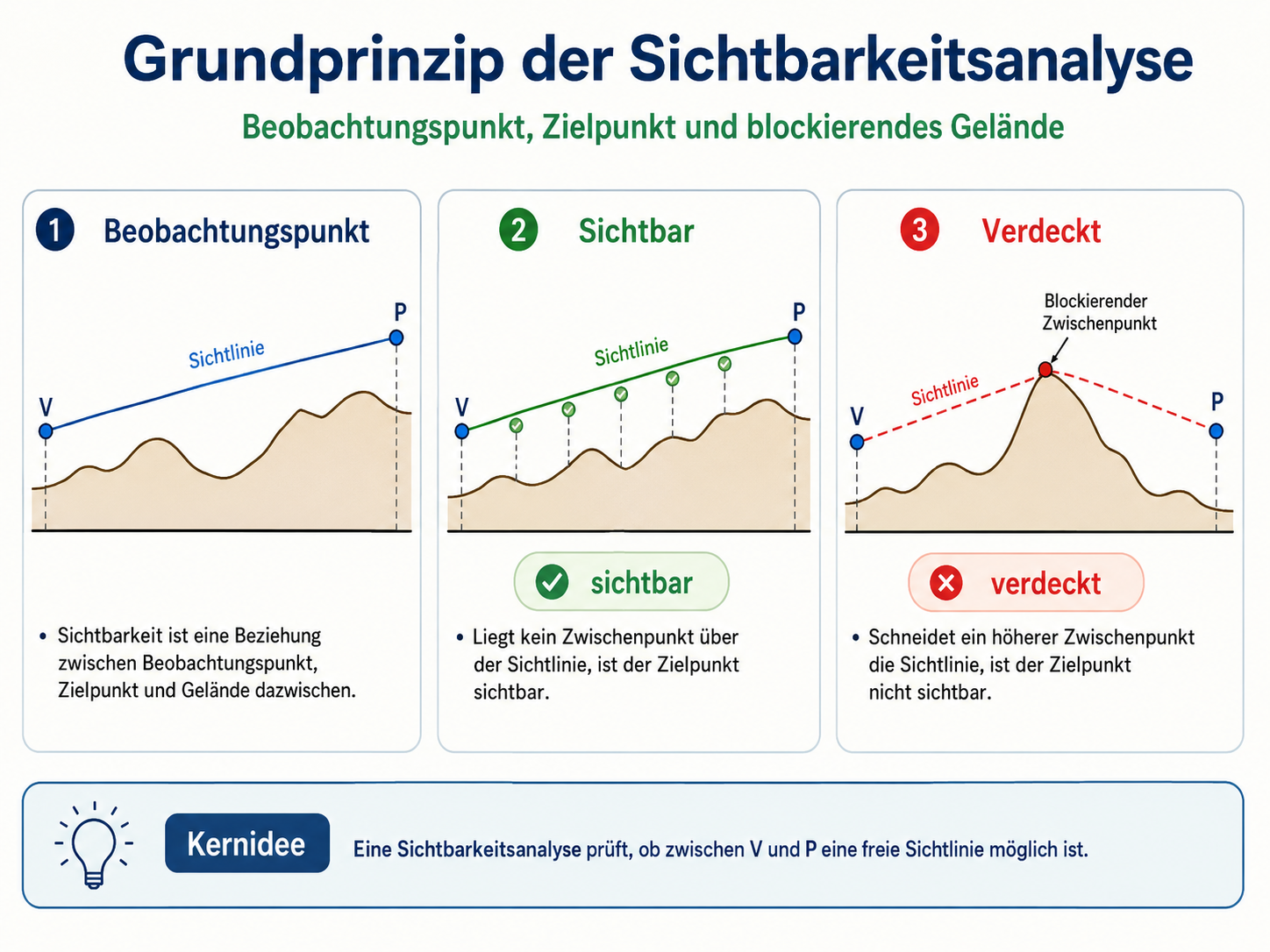
Sichtbarkeit wird entlang einer Sichtlinie geprüft: Wird die Linie vom Gelände geschnitten, ist der Zielpunkt verdeckt.
Geländeprofil und Horizont
Ein Punkt ist sichtbar, wenn sein Vertikalwinkel über dem bisher gespeicherten Horizont liegt.
Vom Zielpunkt zum Sichtfeld
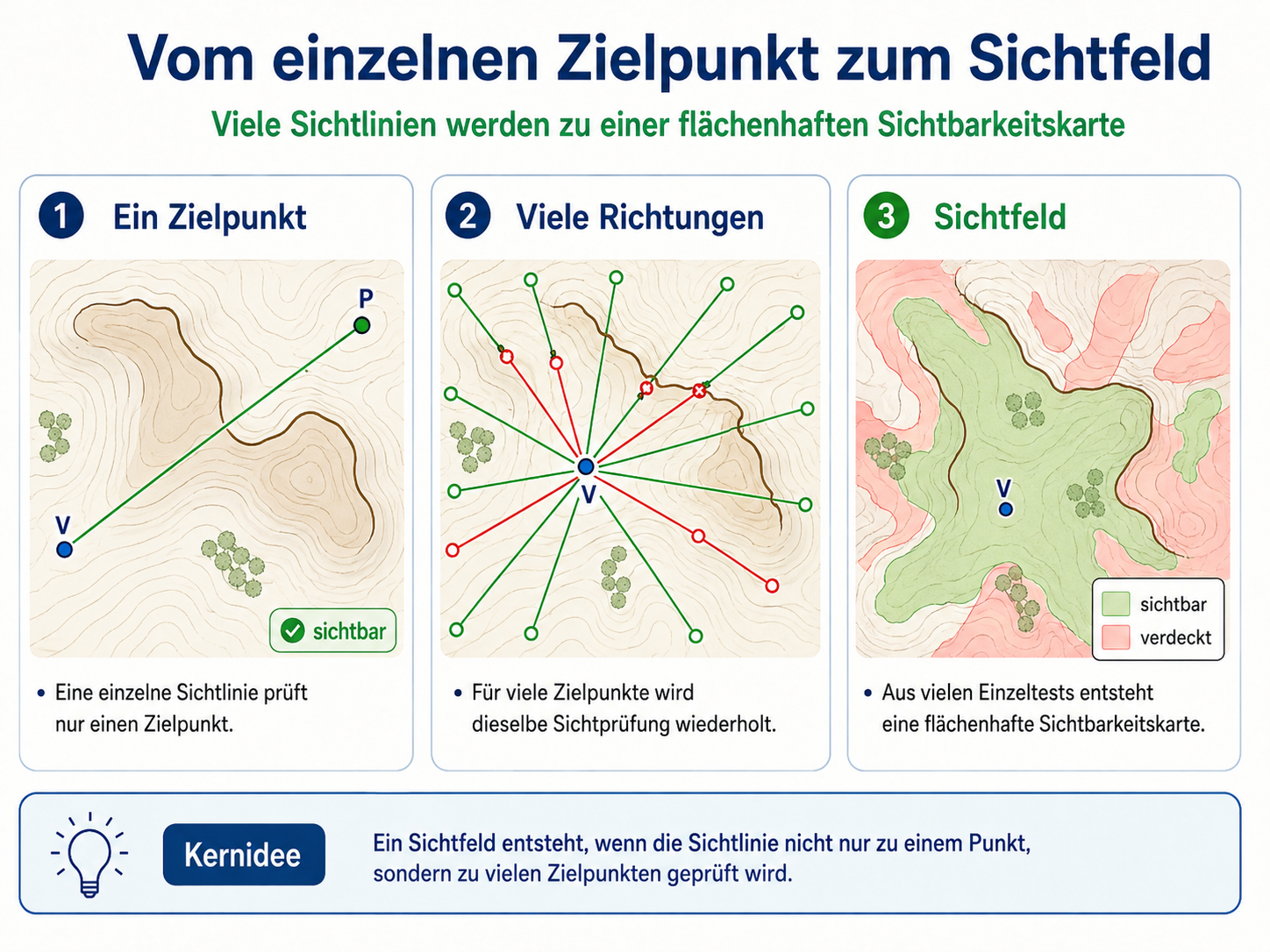
Ein Sichtfeld entsteht, wenn der Sichtlinientest für viele Zielpunkte oder Rasterzellen wiederholt wird.
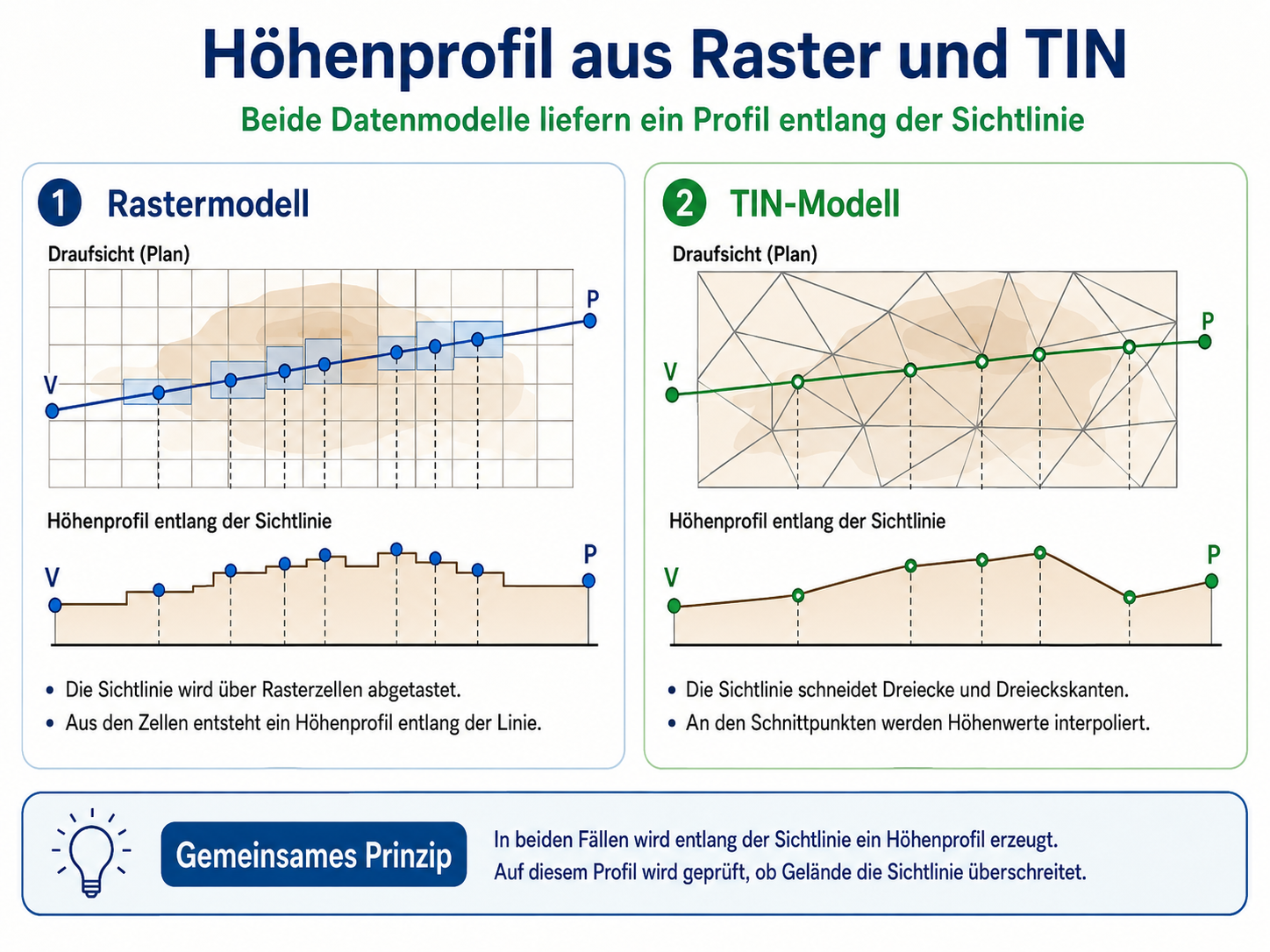
Raster, TIN und Profilgewinnung
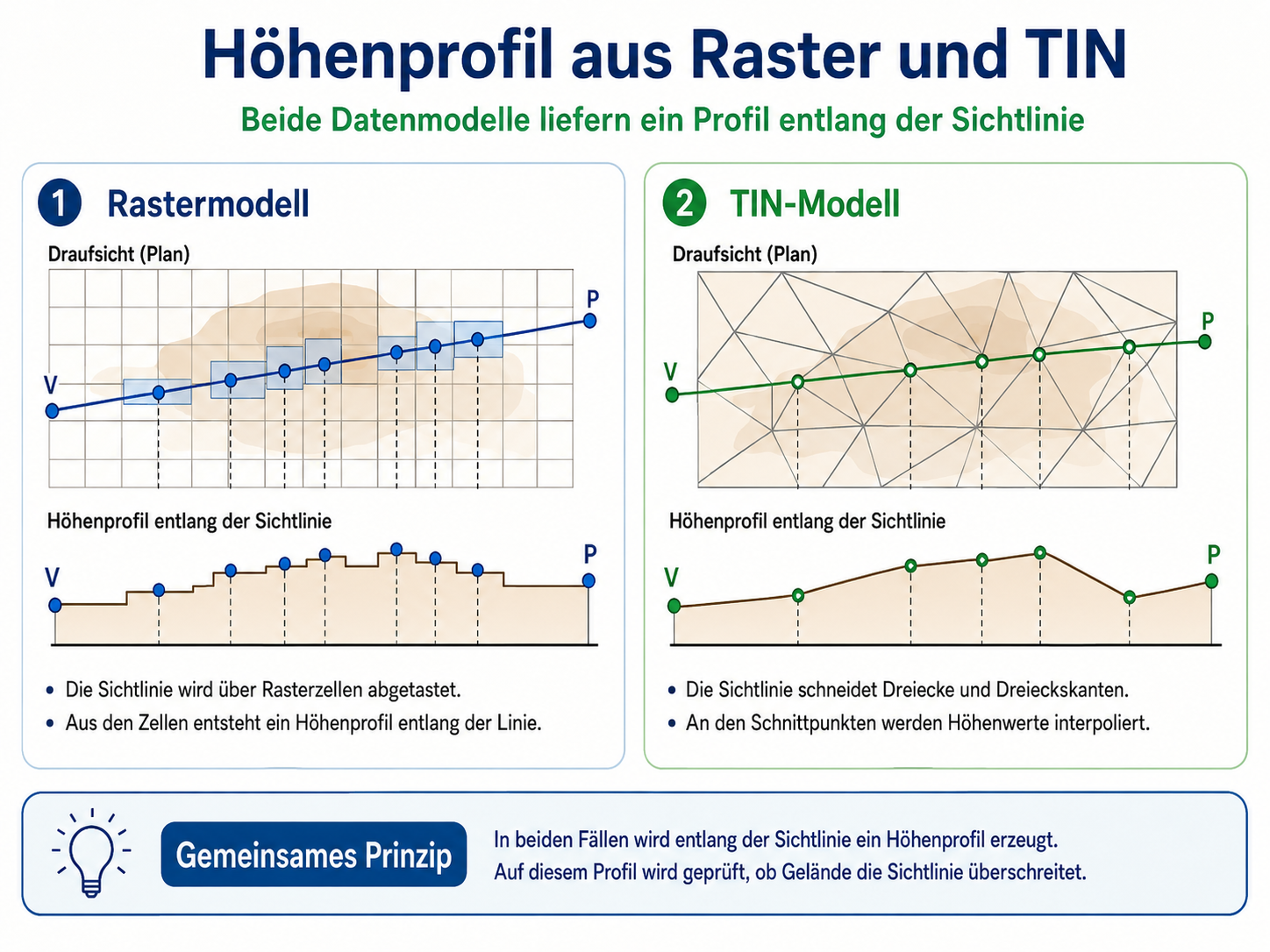
Raster und TIN unterscheiden sich in der Profilgewinnung. Der Sichtlinientest bleibt konzeptionell gleich.
Grenzen der Sichtbarkeitsanalyse
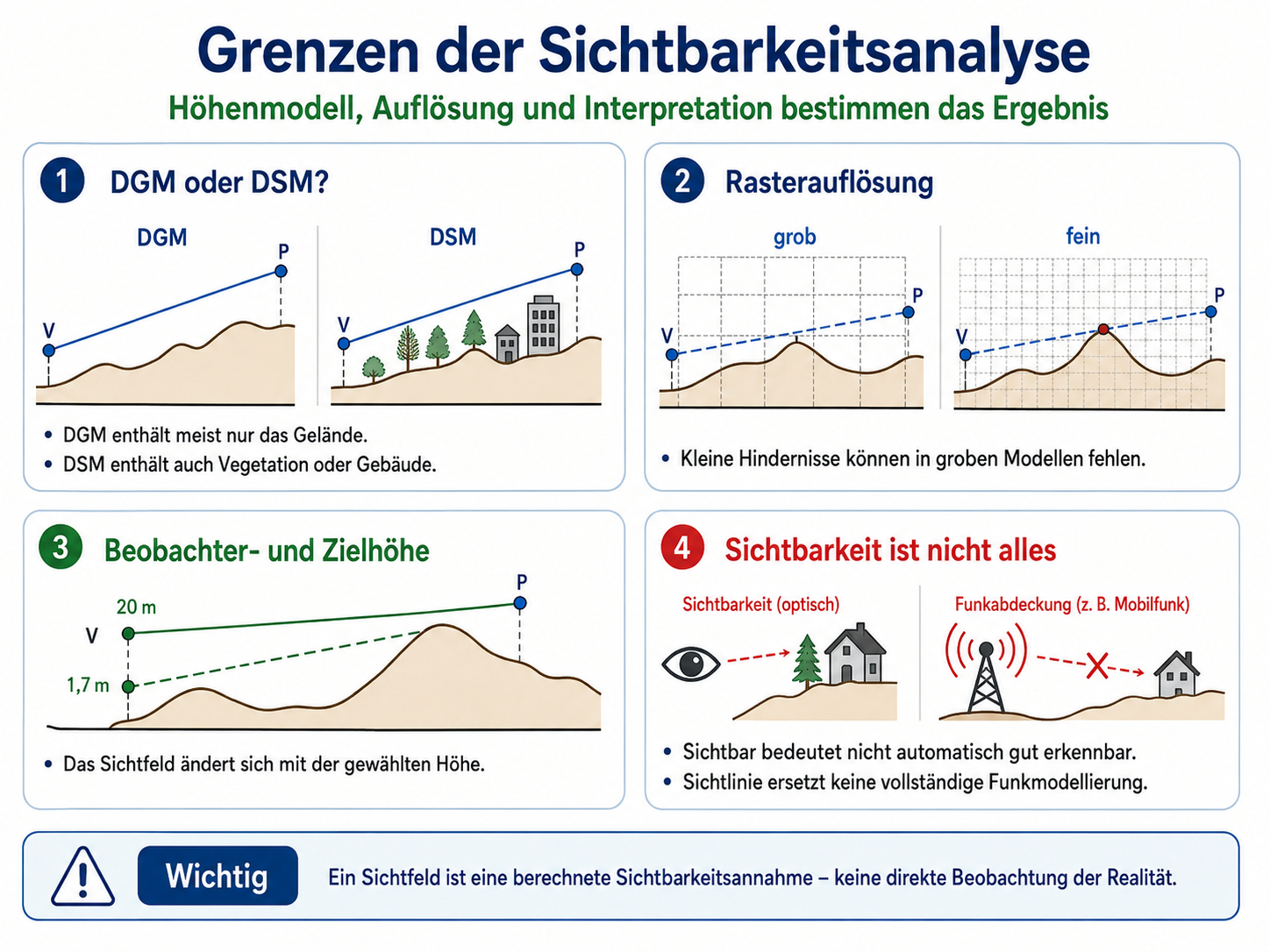
Das Ergebnis hängt von DGM/DSM, Auflösung, Beobachterhöhe, Zielhöhe und realen Hindernissen ab.
Sichtbarkeit ist nicht Wahrnehmung
Ein Sichtfeld zeigt berechnete geometrische Sichtbarkeit.
Es zeigt nicht automatisch:
Ein Sichtfeld ist eine berechnete Sichtbarkeitsannahme, keine direkte Beobachtung.
Prozessbasierte Ableitungen aus Höhenrastern
Reliefhydrologische Ableitungen nutzen eine einfache Annahme:
Wasser folgt dem lokalen Gefälle.
Daraus entstehen Fließrichtungsraster, Akkumulationsraster, potenzielle Gerinne und hydrologische Indexraster.
D8: lokale Fließrichtung
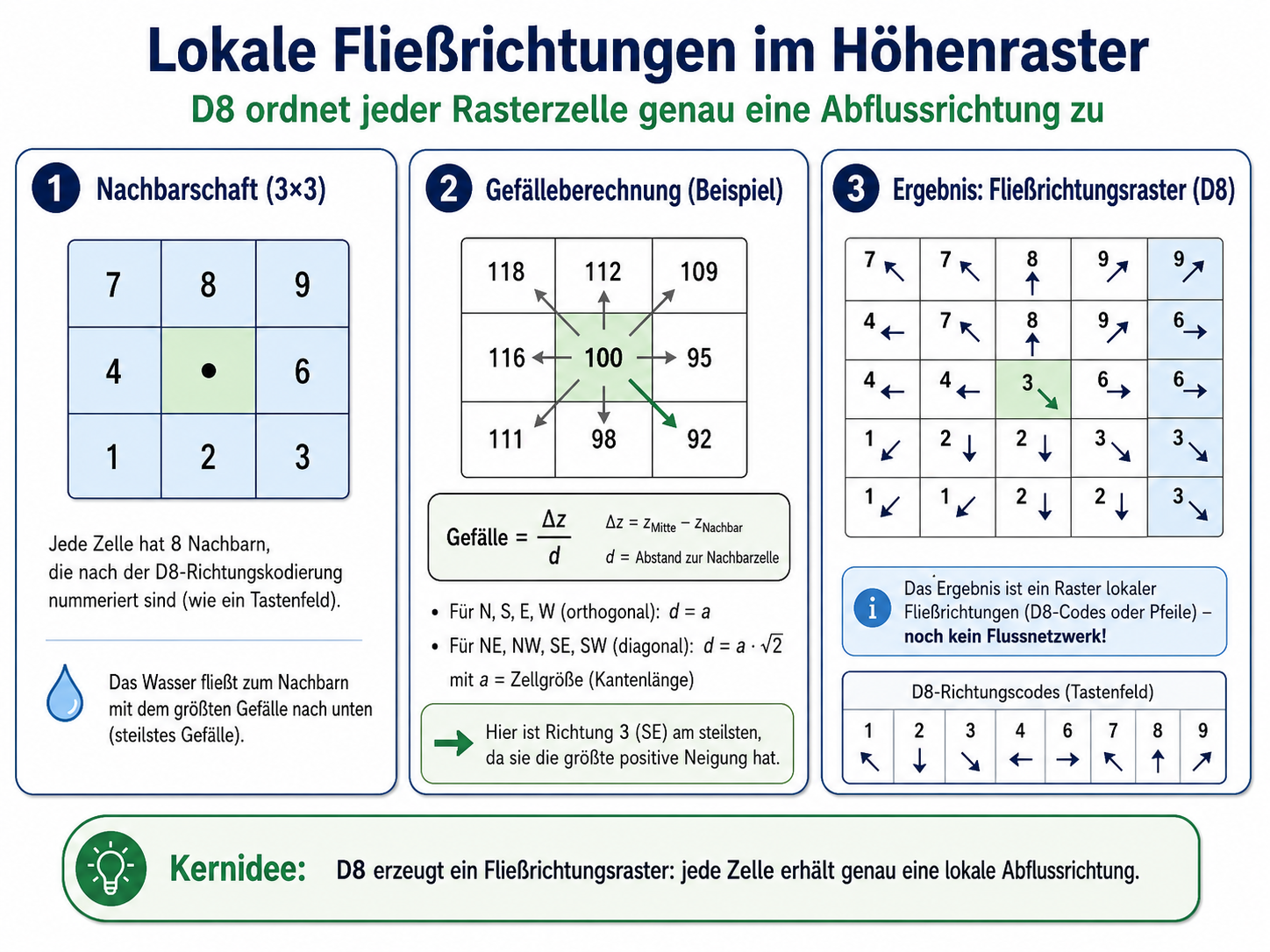
D8 ordnet jeder Rasterzelle genau eine lokale Abflussrichtung zu. Das Ergebnis ist ein Richtungsraster, kein Gewässernetz.
D8-Gefälleformel
Für jede Nachbarzelle wird das lokale Gefälle berechnet:
\[ \tan(\beta) = \frac{\Delta z}{d} \]
bzw.
\[ \beta = \arctan\left(\frac{\Delta z}{d}\right) \]
Direkte Nachbarn haben die Distanz \[d=a\], diagonale Nachbarn \[d=a\sqrt{2}\].
Flow Accumulation als Rasterwert
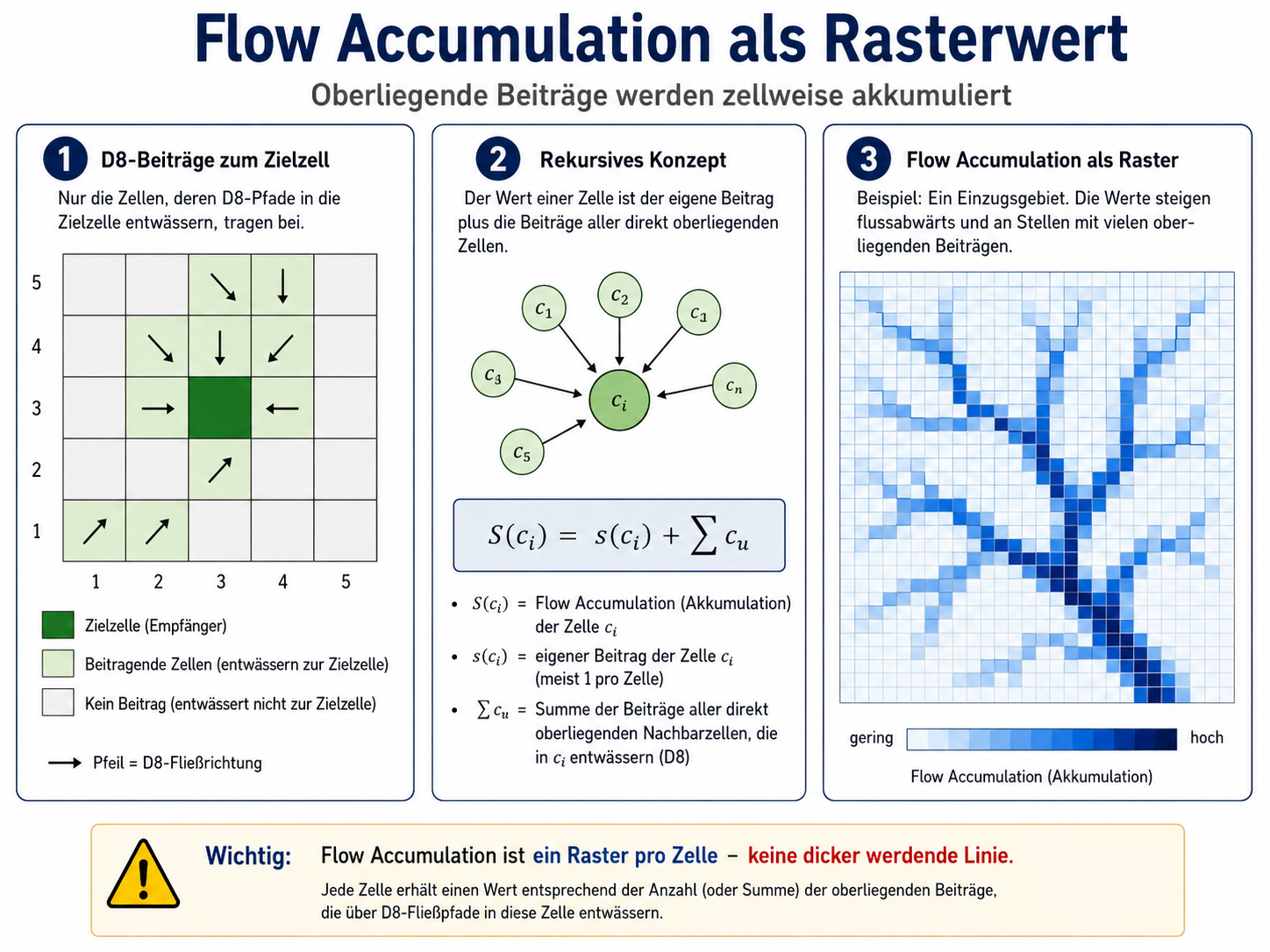
Flow Accumulation ist ein Zellwert-Raster. Hohe Werte erscheinen als intensivere Rasterzellen, nicht als dicker werdende Flusslinien.
Akkumulation: rekursive Logik
Der akkumulierte Wert einer Zelle setzt sich aus Eigenbeitrag und oberliegenden Beiträgen zusammen:
\[ S(c_i) = s(c_i) + \sum_u S(c_u) \]
Gerinne entstehen erst durch Schwellenwertbildung auf diesem Raster, nicht als Primäroutput des Algorithmus.
Topographischer Feuchteindex
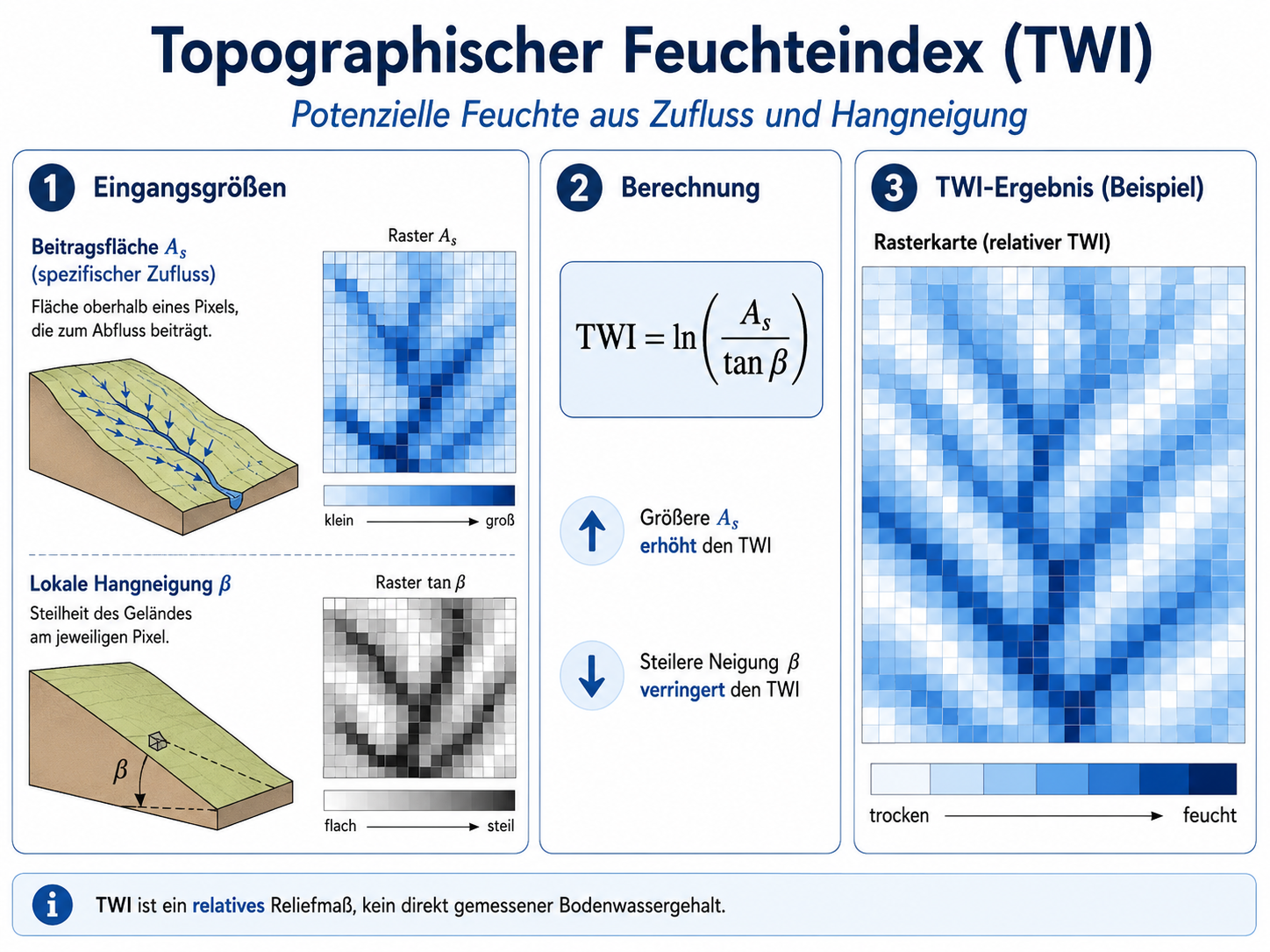
Der TWI kombiniert beitragende Fläche und Hangneigung. Er zeigt potenziell feuchtere Reliefpositionen, keinen gemessenen Bodenwassergehalt.
TWI-Formel
\[ TWI = \ln\left(\frac{A_s}{\tan \beta}\right) \]
Der Index wird größer bei viel oberliegender beitragender Fläche und geringer lokaler Hangneigung.
SPI und STI
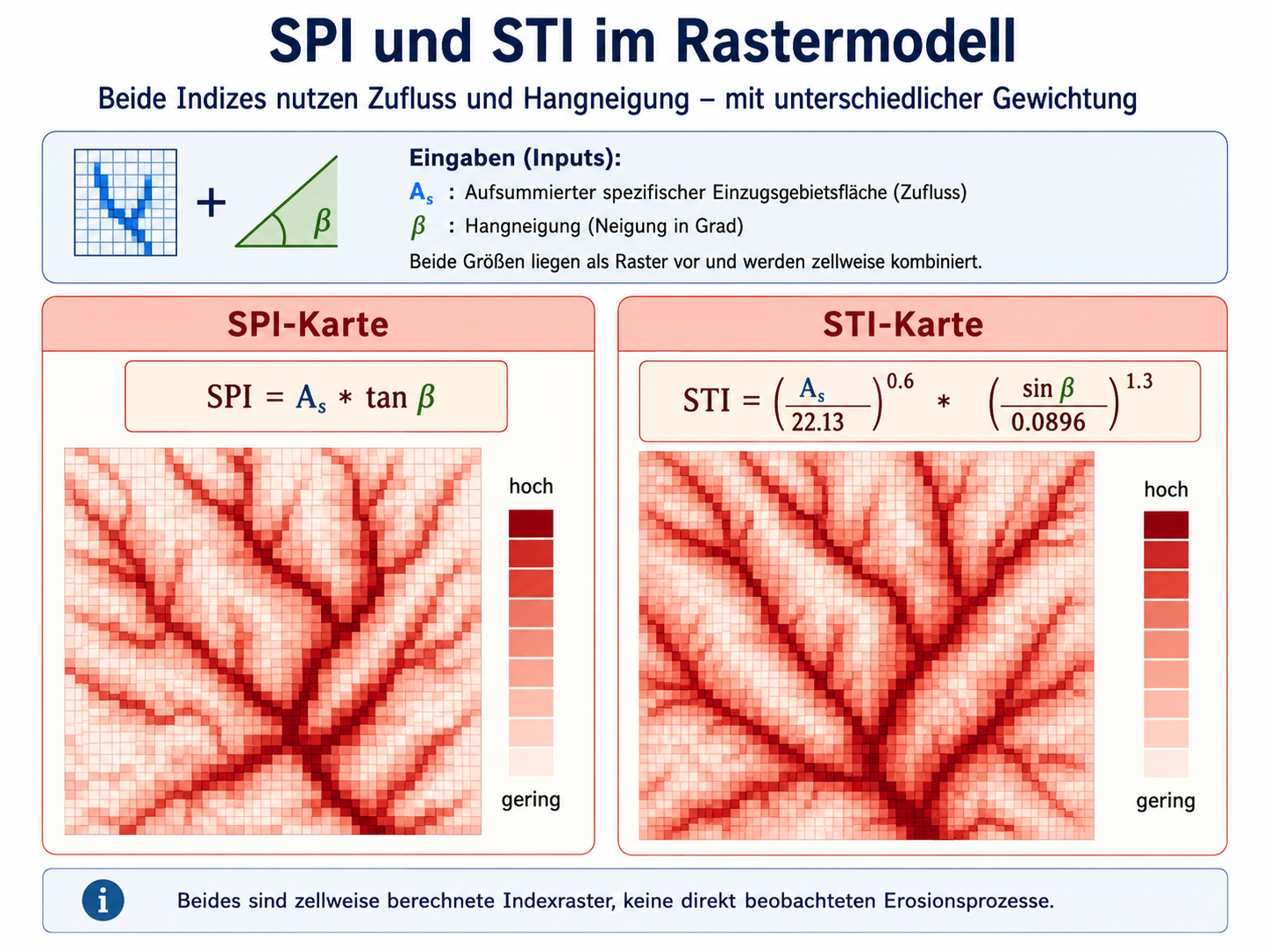
SPI und STI nutzen Zufluss und Hangneigung, gewichten sie aber anders. Beide sind Indexraster, keine beobachteten Erosionskarten.
SPI und STI: Formeln
\[ SPI = A_s \cdot \tan \beta \]
\[ STI = \left(\frac{A_s}{22.13}\right)^{0.6} \cdot \left(\frac{\sin \beta}{0.0896}\right)^{1.3} \]
Ähnliche Muster entstehen, weil beide Indizes stark von beitragender Fläche und konzentriertem Abfluss geprägt werden.
Maximale Fließweglänge
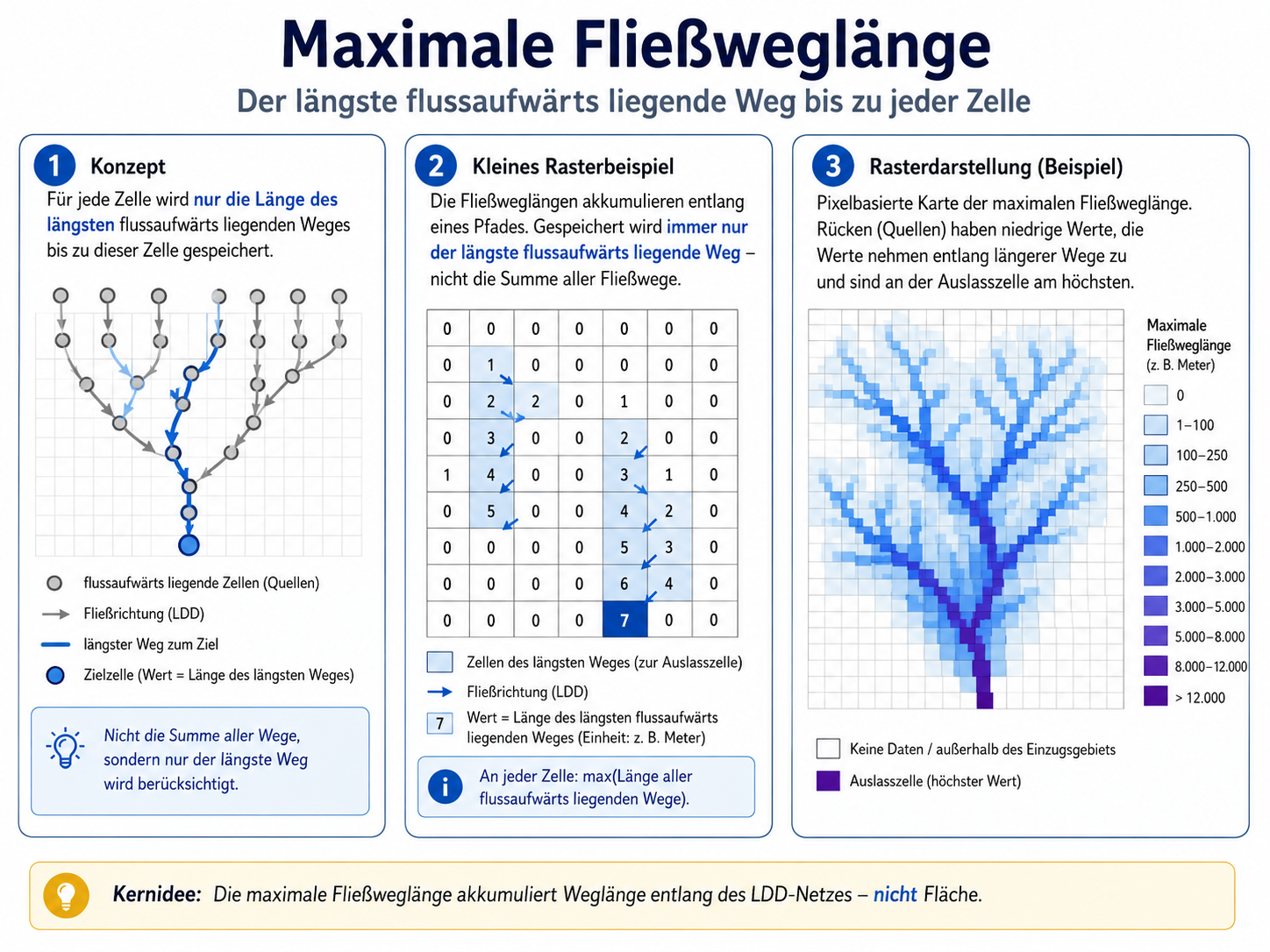
Gespeichert wird der längste flussaufwärts gelegene Weg bis zu einer Zelle, nicht die Summe aller Fließwege.
Gemeinsame Logik der Einheit
Alle Beispiele folgen derselben Grundstruktur:
Voronoi: Punktlage → Näheannahme → Zuordnungsflächen
Interpolation: Punktwerte → Schätzmodell → Oberfläche
DGM: Höhe → lokale Ableitung → Geländeparameter
Sichtbarkeit: Höhe → Sichtlinie → Sichtfeld
Reliefhydrologie: Höhe → Gefälle → Prozessraster
Prüfregel für räumliche Ableitungen
Bei jeder räumlichen Ableitung muss gefragt werden:
Eine GIS-Analyse ist erst fachlich belastbar, wenn genau diese Kette transparent bleibt.
Übung: Ableitungen vergleichen
Wählen Sie drei Beispiele aus der Einheit und vergleichen Sie:
Beschreiben Sie jeweils:
- welche Ausgangsdaten verwendet werden,
- welche Annahme die Methode trifft,
- welches neue räumliche Produkt entsteht,
- welche Grenze die Interpretation hat.
Abschluss
Räumliche Analyse erzeugt keine automatische Wahrheit.
Sie erzeugt nachvollziehbare, aber annahmenabhängige räumliche Ableitungen.
Der fachliche Kern liegt nicht im Werkzeug, sondern in der begründeten Übersetzung von Frage, Daten, Operation und Interpretation.